In June, 2015 Elon Musk announced a competition that inspired students and engineers to come together for a common goal and dedicate time and effort to the realization of a much needed faster, more efficient transportation system.
Hyperloop is a concept for a high-speed mass transit system based on a low pressurized tube medium in which capsules ride using some form of levitation to minimize friction (air cushion or magnetic levitation). Elon Musk first proposed this system in 2012 and captured the imagination of many. The capsule would be moving at an average speed of 600 mph (970 km/hr), with a top speed of 760 mph (1200 km/hr). In 2013 a preliminary design document was released by SpaceX outlining a proposed route from Los Angeles to San Francisco, a 350 mile stretch with an expected journey time of 35 minutes.
A friend, Dustin Oprea, and I could not resist the temptation and signed up for the competition immediately. The competition had 2 tracks, a subsystems design and a design & build in which SpaceX committed to build a 5-mile track for teams to test their designs. After some deliberation and given our modest team size (most academic teams we encountered had anywhere between 15-45 members) we decided to tackle the subsystems category. We chose 2 areas in which we thought we could make contributions and have fun in the process: outer shell pod design and safety. Once that was decided and the proper forms were submitted to the Hyperloop committee, our team was born; we called it Hyperbolic.


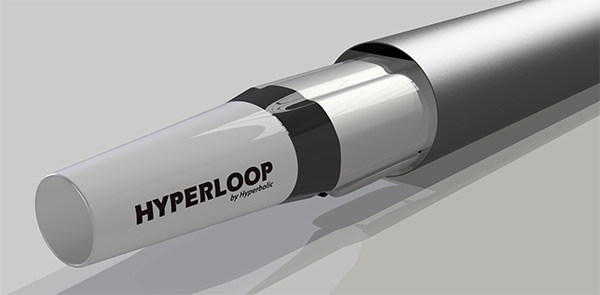
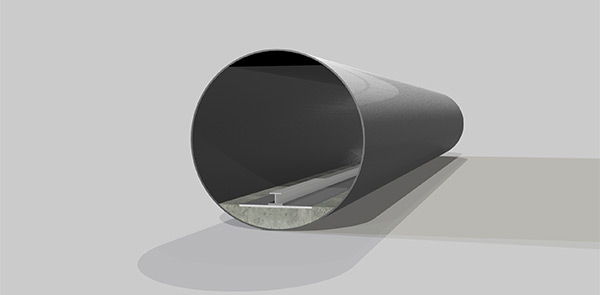
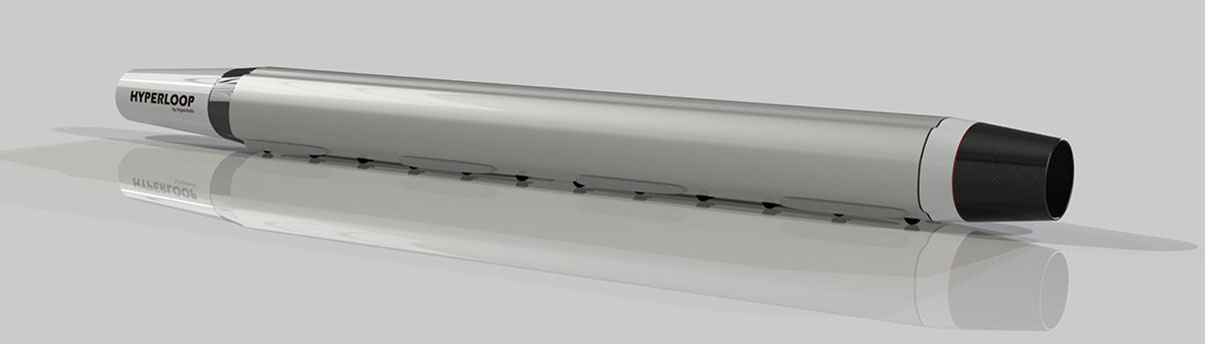
Outer shell pod design
This objective presented several challenges in terms of simulating the conditions of the pod and given the tight dimensional constraints on the traveling medium. Furthermore, none of us are experts at modern 3D CAD software to adequately depict our vision. Nevertheless, we did our best to create an adequate rendering of our design. Our main objective was to maximize the interior volume given the physical constraints and provide a design that would depict to the public the nature of this futuristic way to travel yet it would be designed for manufacturability in mind. There are several performance conscious decisions present in the design. However, more wind tunnel simulations are needed to optimize the airflow around the capsule and minimize its drag coefficient.
Safety
For a transportation system of this complexity and speed, safety will be of paramount concern. Our second objective was to create a supervisor like agent that monitors sensor reading and is able to broadcast them in a variety of mediums and take actions, if needed. We called the initiative SafetyOS. The main objective of the platform is to give first-class attention to events that might threaten human life. SafetyOS provides visual and audible annunciators for different levels of severity and on a future state, act to alleviate or prevent downstream hazardous situations due to a known system failure or malfunction
Overall platform objectives
- Display telemetry/instrumentation reflecting real-time sensor inputs
- Record sensor readings and derived values (e.g. velocity, acceleration) in a local, high-speed time-series database
- Transmit data to home-base
- Announce important events
- Push data to the blackbox
- Actively react to troublesome conditions by automatically limiting movement, notifying personnel, and home-base
- Allow home-base to remotely limit vehicle movement in response to external information (e.g. strong wind bursts that could rattle the pods, disabled units ahead on track, damage to track, etc.)
- Allow home-base to communicate messages to the forward-cabin
- Data redundancy, error recovery, messaging failure re-transmissions and graceful degradation as critical systems might fail or network latency might be high
- Remote upgradability (push updates throughout the system)


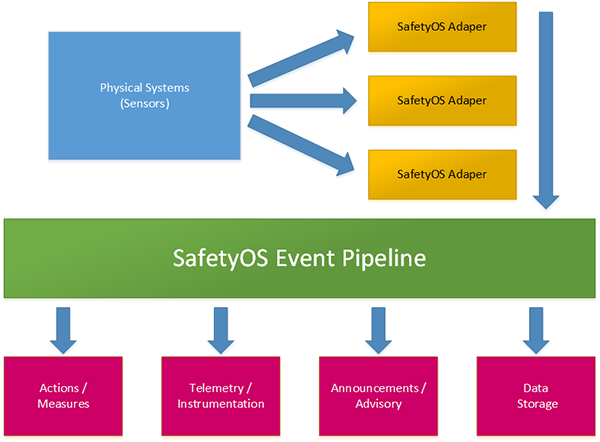
The system relies on the concept of adapters, highly specialized pieces of code designed to interface with physical systems for the purpose gathering data from a wide array of sensors. This could vary in complexity based on the specific system they are interfacing with. Furthermore, these readings could further be aggregated or simply be used to derive other readings (calculated data vs. raw data). The following diagram exemplifies the role of adapters within the system.
In order to achieve all those objectives, the platform needs to be responsive, scalable and highly concurrent. Consequently, we chose Go as the programming language, it is very performant and concurrency is at the core of its design. The transport layer is based on web-sockets communications to minimize latency and the datastore chosen is InfluxDB, a high-performance time series database. As you can see every component was selected with performance in mind, under these high-speed conditions a few milliseconds could mean the difference between normal operating conditions and disaster. It is absolutely critical for the entire system to operate based on data as realtime as possible, performance is not simply a feature, it is a necessity.
After a few intermediate milestones, we were invited to attend the finals at Texas A&M on January 29-30, 2016. Unfortunately my friend Dustin could not make it to the event, it was quite an experience. My dear brother in-law, John, accompany me on the trip and we had a terrific time. As a non-student team the process was a bit different. Student teams had to go through a final presentation under a panel of judges and prizes were awarded based on a series of criteria. I found it unfortunate that non-student teams were not given the same opportunities. Nevertheless, it was a pleasure and quite a privilege to participate in such an event, the first of its kind. I hope we can continue this work in cooperation with other teams in the future. We have been approached by several universities for collaboration and we hope to engage with them in the future. Media coverage at the event was surprisingly broad, there were several interested parties from all over the world. Even at this early stage, the Hyperloop has captivated the imagination an curiosity of many. The world is ready for a new transportation technology and the Hyperloop’s momentum and Elon Musk’s support might just make the cut. The secretary of the Department of Transportation, Anthony Foxx (see picture below), gave the keynote speech and caution the enthusiasm by highlighting slow government adoption and safety considerations. He was cautiously optimistic which is a great start for a journey of this magnitude.
On the last day, Elon made a surprising appearance on stage (see picture below). The floor went wild, it was definitely a suitable closing for the event. He provided positive feedback based on the quality of the work he has seen and stayed to answer several questions from the audience. He seemed quite impressed with the progress made in such a short period of time and expressed high hopes for the future of Hyperloop. Overall, it was remarkable experience for a good cause, one that sparks the intellect and entertains our wonders.


As of September, 2016, the final stage of the competition has been postponed to early 2017 due to repeated demands from student teams needing more time to complete their pods. A selected group of 20 teams that chose the prototyping route were invited to show their designs on 1 mile track in California that SpaceX is constructing.




No comments: